Generative Modeling of Object Keypoints
for 6D Pose Estimation

rchan@techfak.uni-bielefeld.de
June 26, 2024, DataNinja sAIOnARA 2024 Conference, Bielefeld
What is 6D(oF) Pose Estimation?
- Vision task: estimate 3D translation and 3D rotation of objects
- Input: monocular RGB images and CAD models of objects of interest
Possible Applications
- augmented reality, autonomous vehicles, robotics, ...
- useful when rich positional information is required
General 3D Rotation:
Example 3D Rotation:
 $\mathbf{R} \!=~\!\!\! \begin{pmatrix} 0.11\!\! & -0.92\!\! & 0.37\! \\ -0.69\!\! & -0.39\!\! & -0.62\! \\ 0.72\!\! & -0.19\!\! & -0.67\!\end{pmatrix}$
$\mathbf{R} \!=~\!\!\! \begin{pmatrix} 0.11\!\! & -0.92\!\! & 0.37\! \\ -0.69\!\! & -0.39\!\! & -0.62\! \\ 0.72\!\! & -0.19\!\! & -0.67\!\end{pmatrix}$
Geometry-based Pose Estimation
Given:
We can calculate:
- 2D-3D points: $\{(\mathbf{v}_i^\mathrm{2D}, \mathbf{v}_i^\mathrm{3D})\}_{i=1}^n$
- focal length $f \in \mathbb{R}$
We can calculate:
- rotation $\mathbf{R} \in \mathbb{R}^{3\times 3}$
- translation $\mathbf{t} \in \mathbb{R}^3$
All points are given in their coordinate systems.
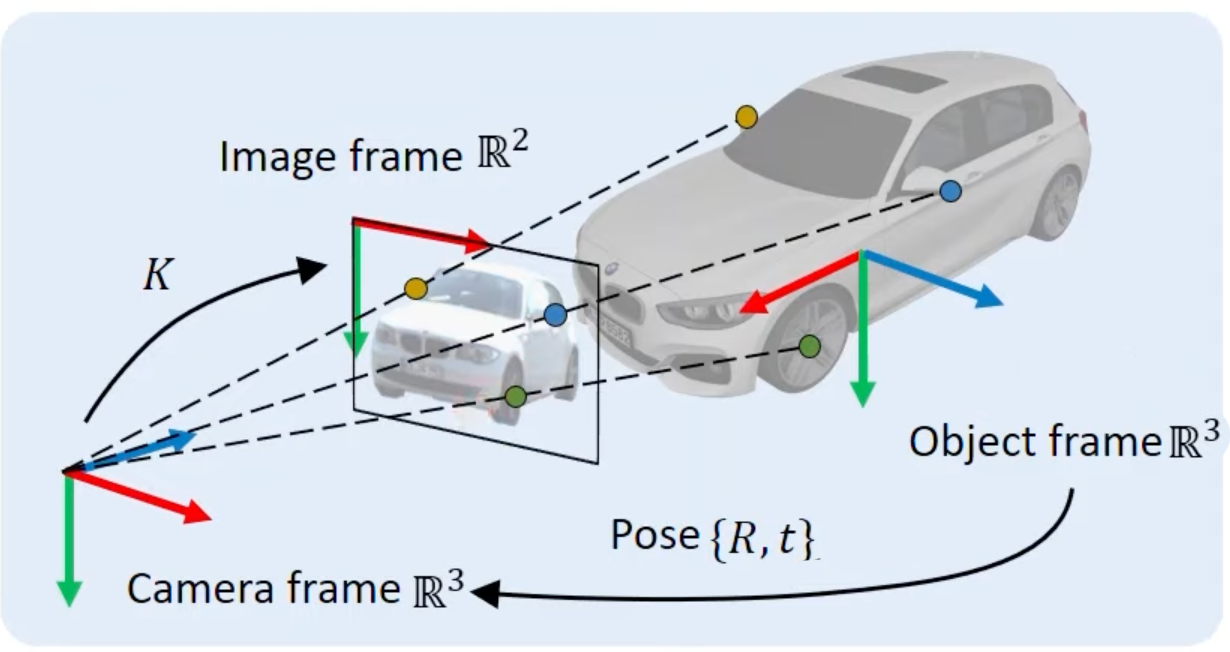
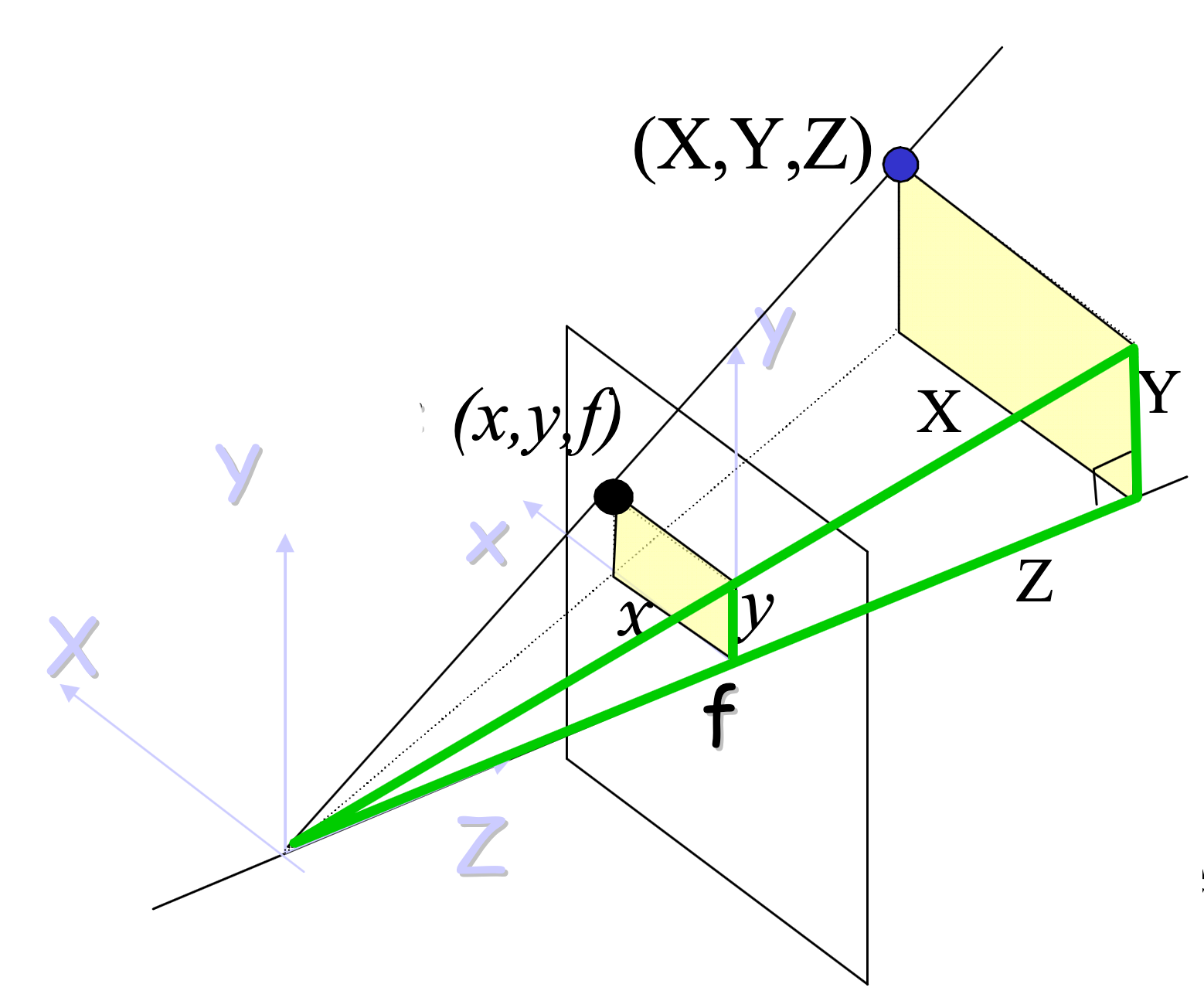
How to project 3D object points $\mathbf{v}^\mathrm{3D} = (U, V, W)^\top$ to 2D image points $\mathbf{v}^\mathrm{2D} = (x,y)^\top$?
Transform: object -> camera:
$$\begin{pmatrix} X \\ Y \\ Z\end{pmatrix} = \mathbf{R} \begin{pmatrix}U \\ V \\ W\end{pmatrix} + \mathbf{t}$$ Transform: camera -> image:
$$x=f\frac{X}{Z},~~ y=f\frac{Y}{Z}$$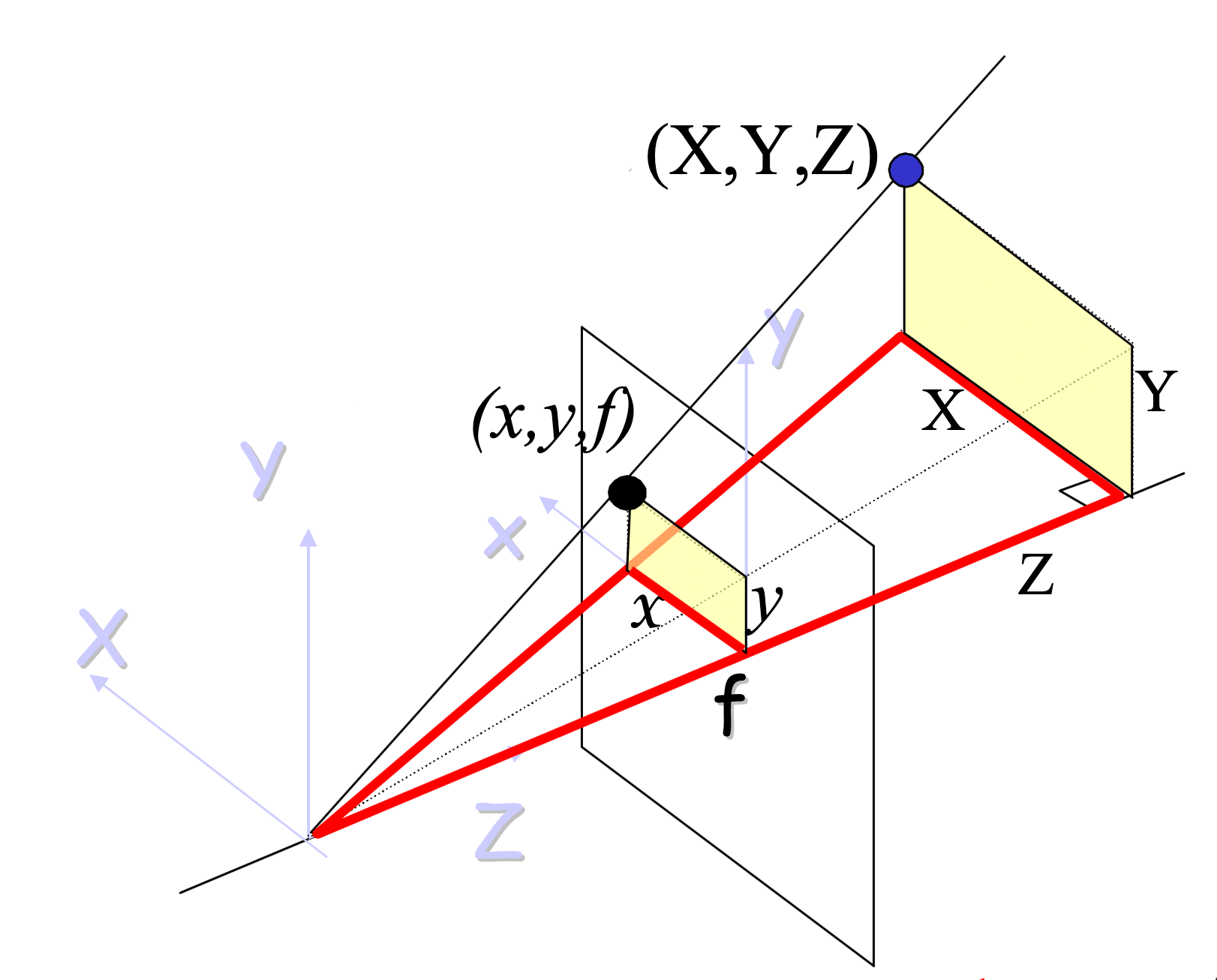
How to project 3D object points $\mathbf{v}^\mathrm{3D} = (U, V, W)^\top$ to 2D image points $\mathbf{v}^\mathrm{2D} = (x,y)^\top$?
Transform: object -> camera:
$$\begin{pmatrix} X \\ Y \\ Z\end{pmatrix} = \mathbf{R} \begin{pmatrix}U \\ V \\ W\end{pmatrix} + \mathbf{t}$$ Transform: camera -> image:
$$x=f\frac{X}{Z},~~ y=f\frac{Y}{Z}$$
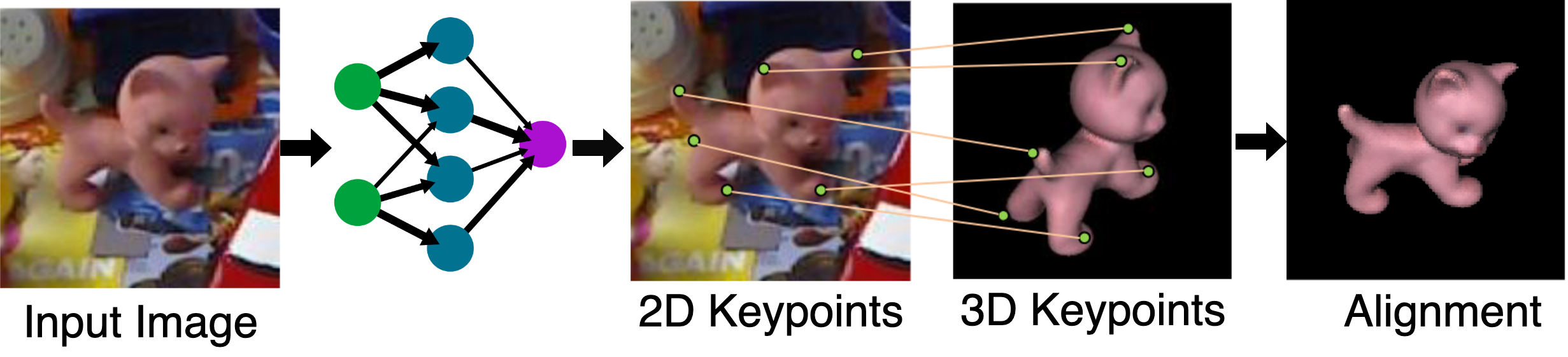
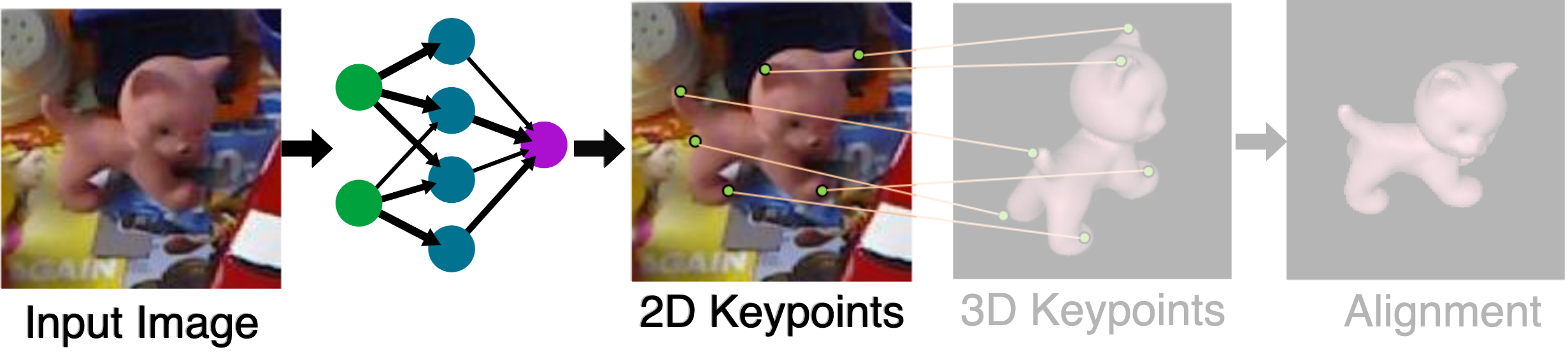
Keypoint-based 6D Pose Estimation
As the 2D points are usually not known, we need to estimate their locations, e.g. with a neural network.
Loss function / optimization objective:
$$\mathcal{L} = \frac{1}{2} \sum_{i=1}^n \left\| \begin{pmatrix} x_i \\ y_i\end{pmatrix} - \begin{pmatrix} \hat{x}_i \\ \hat{y}_i \end{pmatrix} \right\|_2^2$$ -> minimize the reprojection error
$$\mathcal{L} = \frac{1}{2} \sum_{i=1}^n \left\| \begin{pmatrix} x_i \\ y_i\end{pmatrix} - \begin{pmatrix} \hat{x}_i \\ \hat{y}_i \end{pmatrix} \right\|_2^2$$ -> minimize the reprojection error
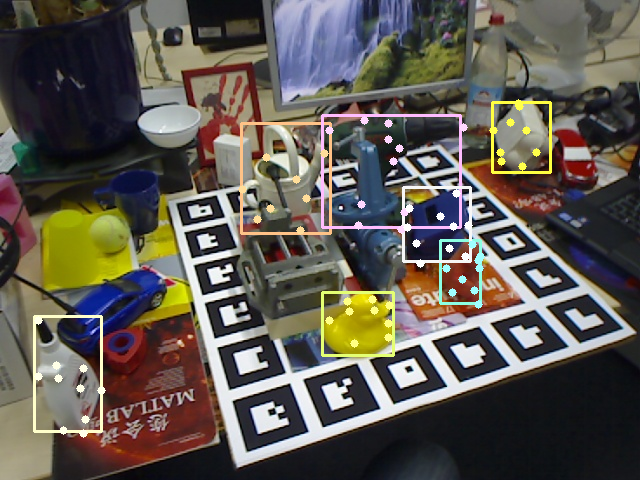
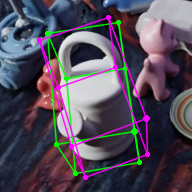
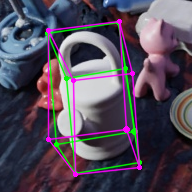
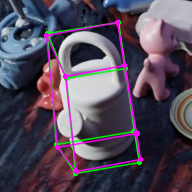
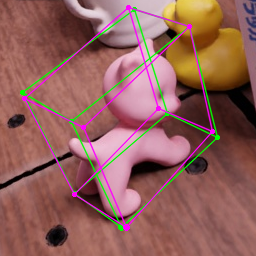
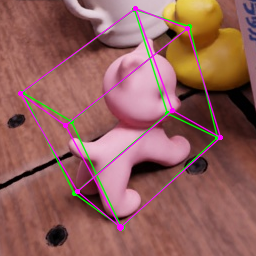
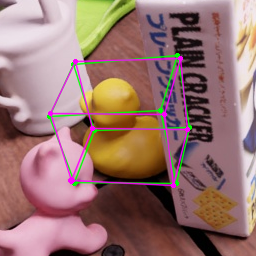
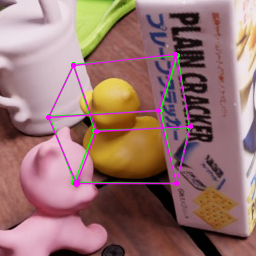
Prediction Examples
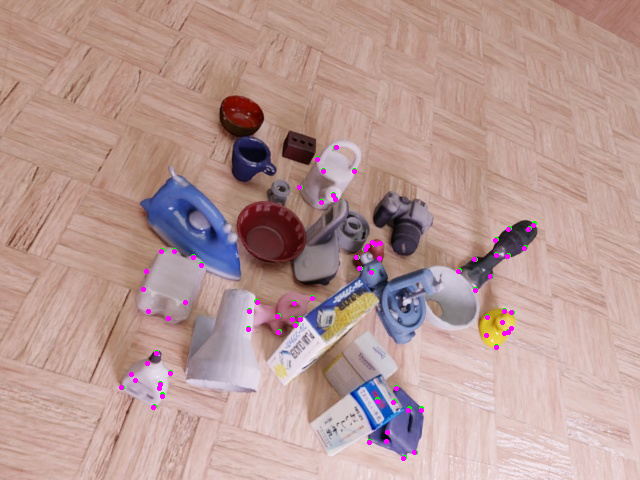
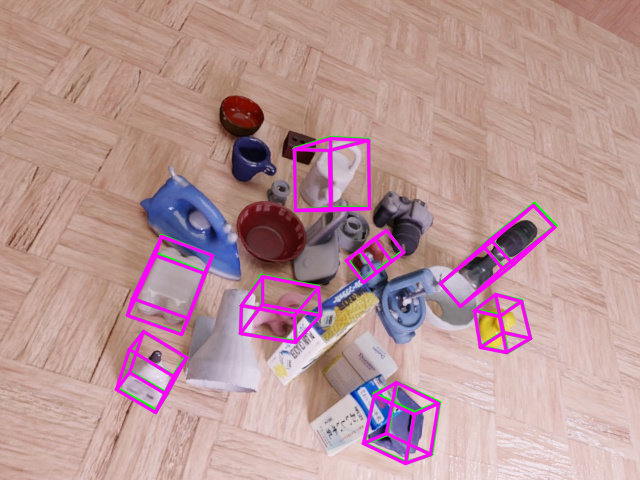




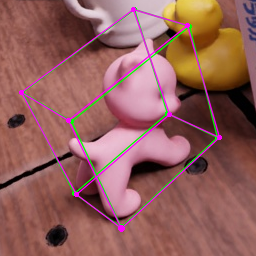
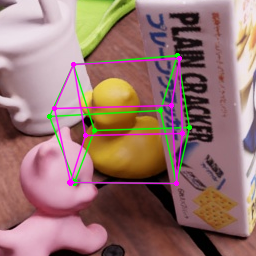
Failure Cases


Could we have identified such error...
- ... if we had predicted entire sets of possible keypoints?
- ... if we had information on the spatial correlation of keypoints?
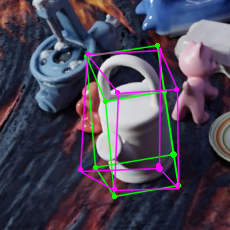
Distribution of valid 2D keypoints sets
Distribution of valid 2D keypoints sets
"Ground Truth":
Distribution of valid 2D keypoints sets
"Ground Truth":
Prediction (Probabilistic) Generative Model:
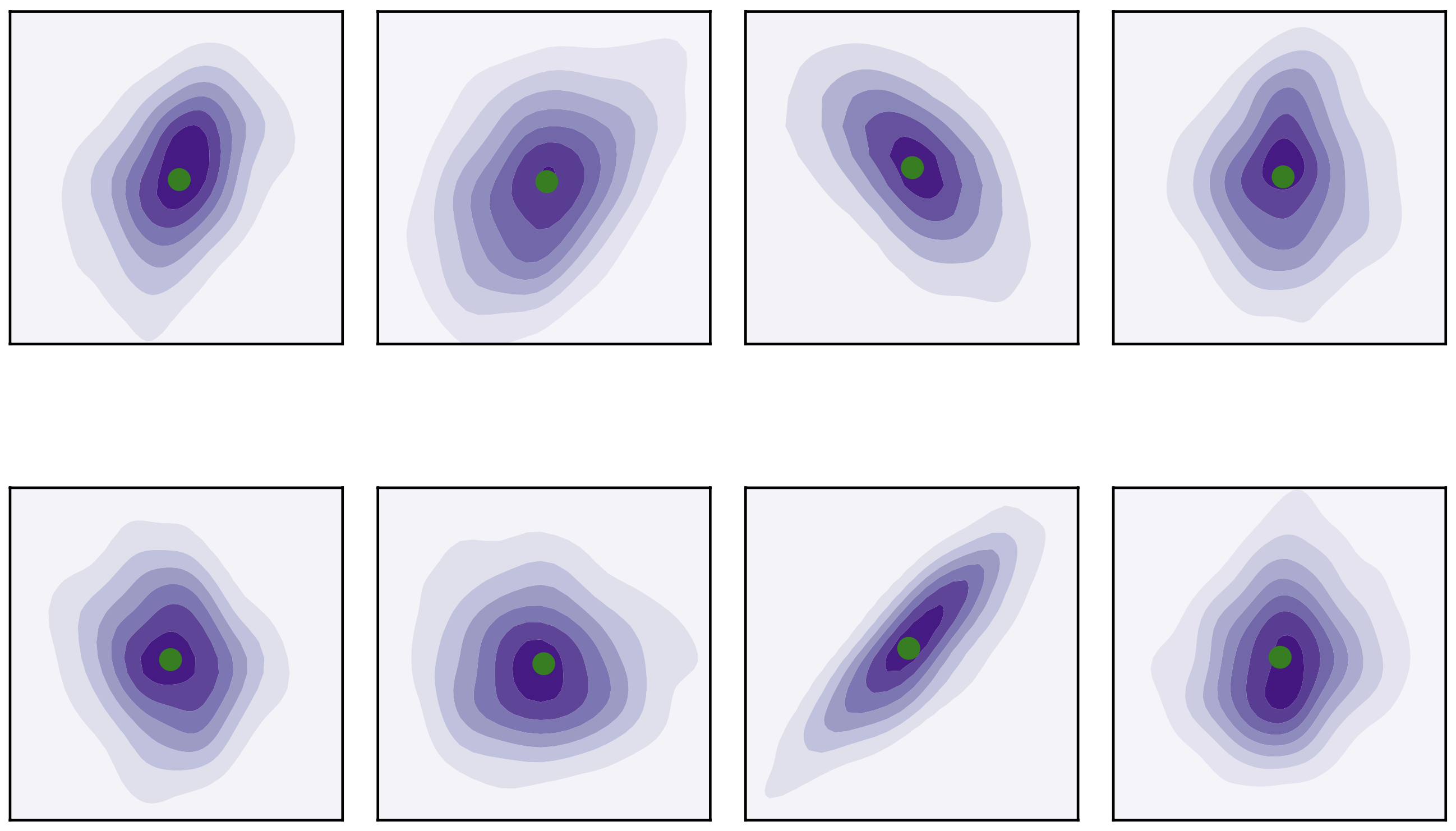
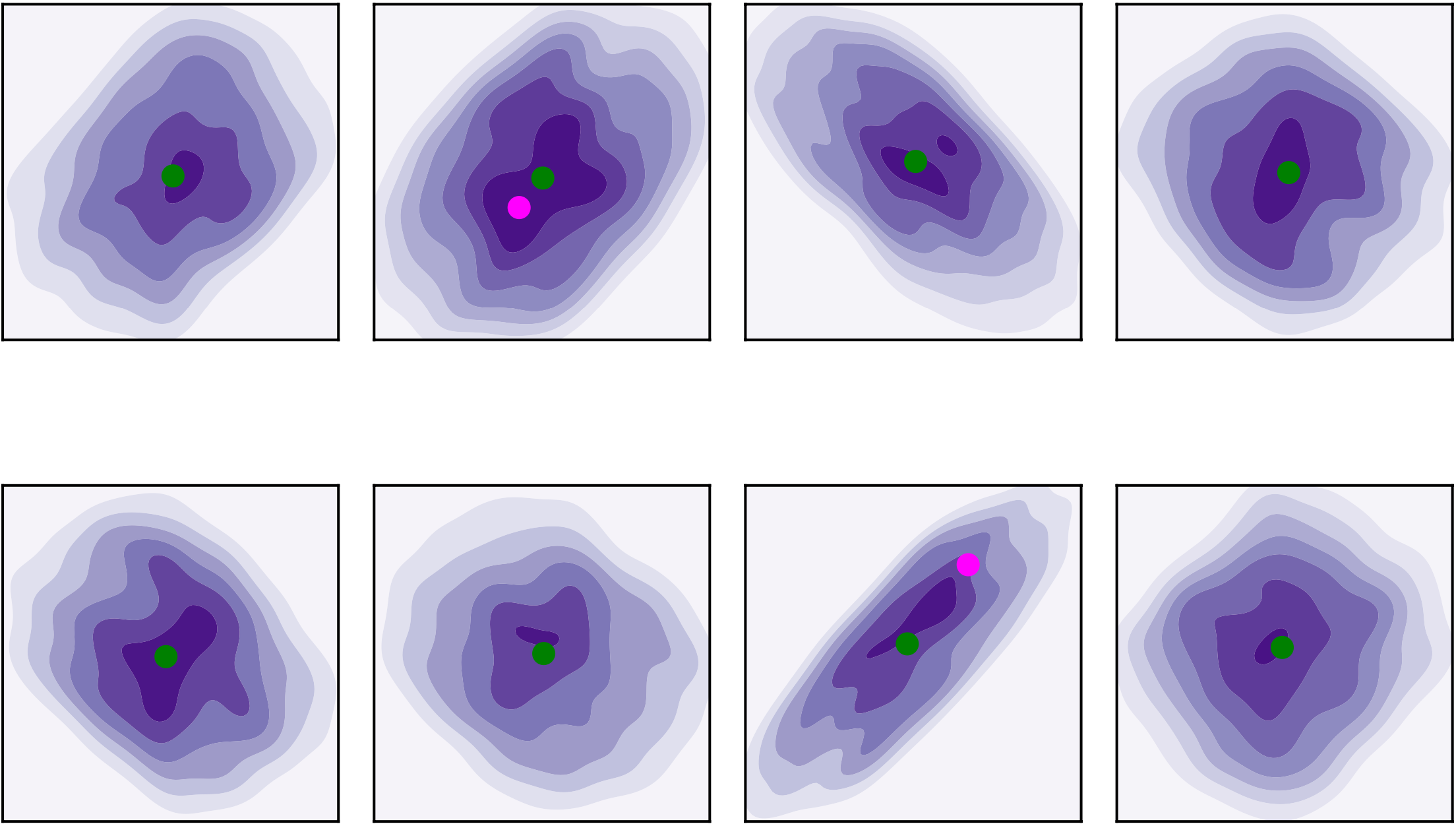
Uncertainty Quantification via Density Estimation

$$\begin{align*}
\textrm{nll} &= 1578100.00 \\
\textrm{err} &= 16.37
\end{align*}$$

$$\begin{align*}
\textrm{nll} &= 1376.29 \\
\textrm{err} &= 6.83
\end{align*}$$

$$\begin{align*}
\textrm{nll} &= -50.14 \\
\textrm{err} &= 3.24
\end{align*}$$
Uncertainty Quantification via Density Estimation

$$\begin{align*}
\textrm{nll} &= 458.27 \\
\textrm{err} &= 8.61
\end{align*}$$

$$\begin{align*}
\textrm{nll} &= -37.40 \\
\textrm{err} &= 4.36
\end{align*}$$

$$\begin{align*}
\textrm{nll} &= -47.55 \\
\textrm{err} &= 1.95
\end{align*}$$
Uncertainty Quantification via Density Estimation

$$\begin{align*}
\textrm{nll} &= 5357.28 \\
\textrm{err} &= 8.13
\end{align*}$$

$$\begin{align*}
\textrm{nll} &= -45.43 \\
\textrm{err} &= 4.71
\end{align*}$$

$$\begin{align*}
\textrm{nll} &= -47.30 \\
\textrm{err} &= 2.24
\end{align*}$$
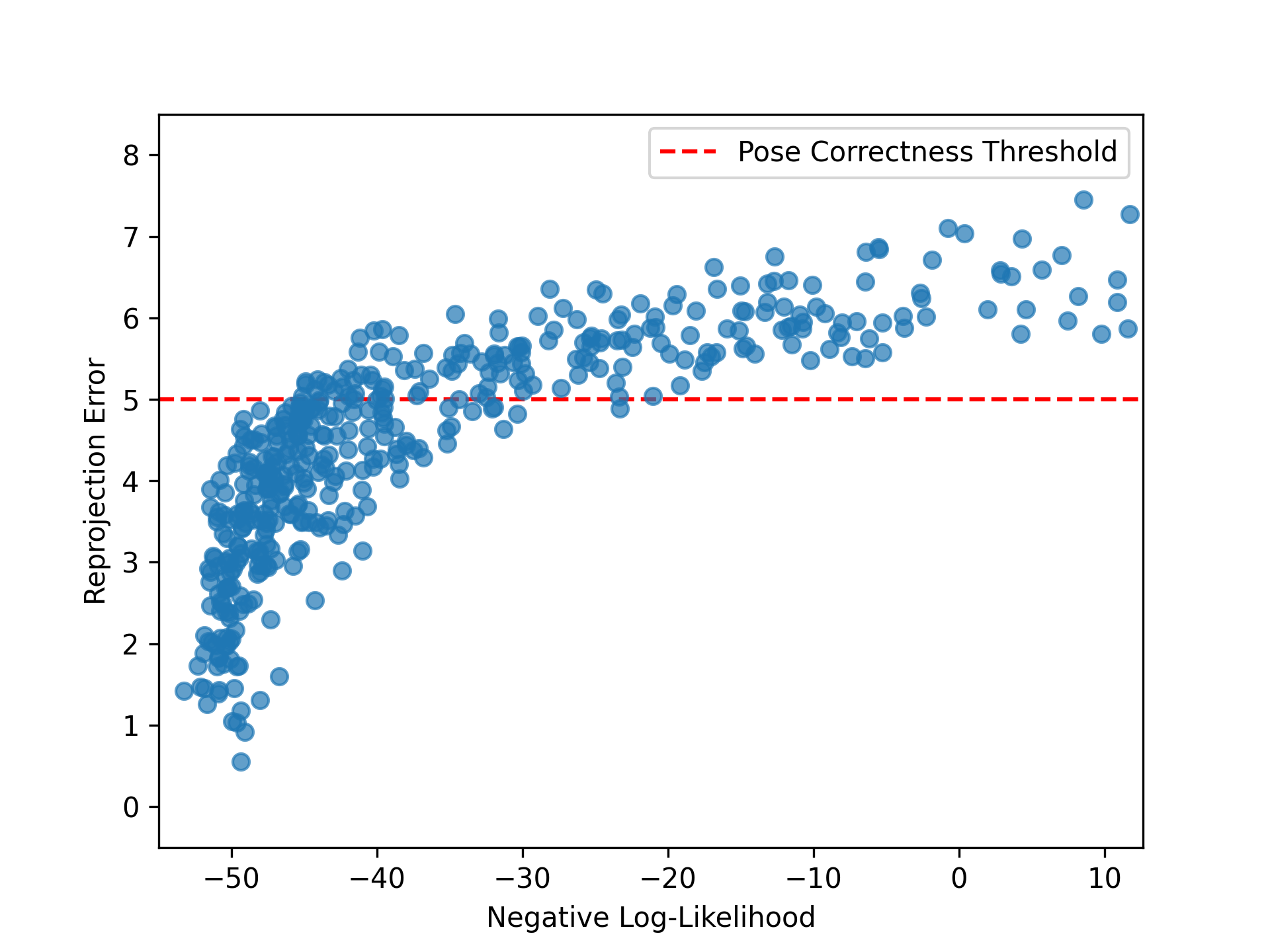
Correlation between Likelihood and Error
Thank you.
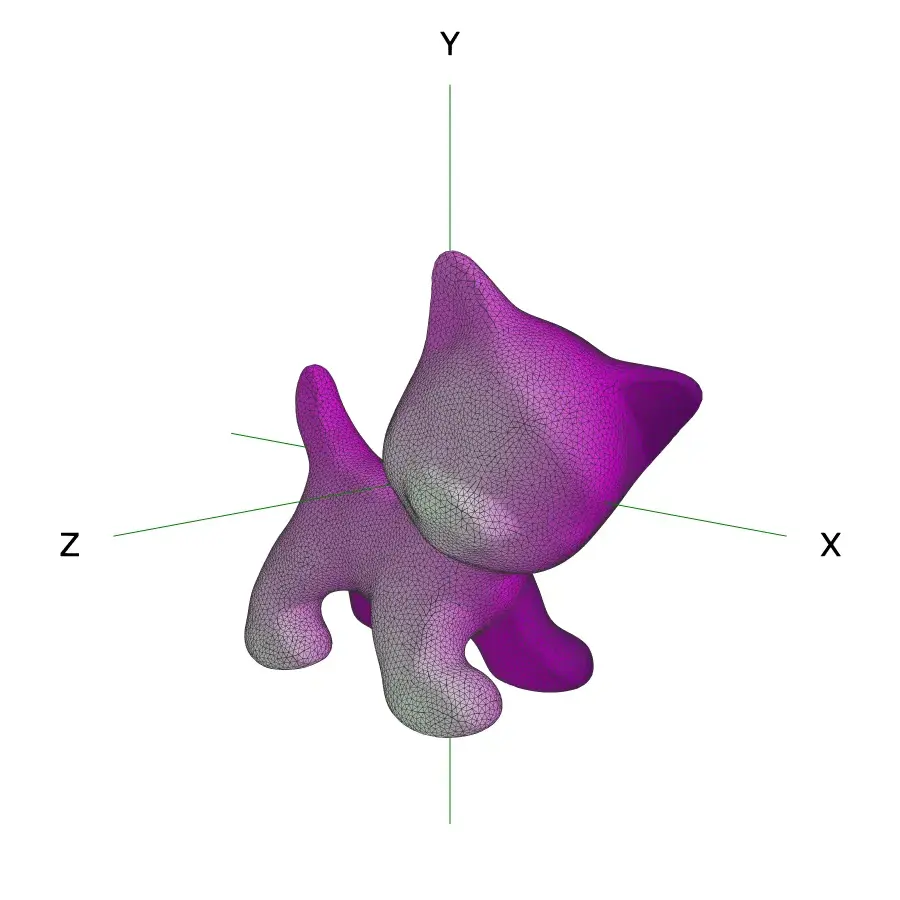
What are Comuter-aided Design (CAD) Models?
What are Comuter-aided Design (CAD) Models?
How to Generate CAD Models?




CAD Model generated with 3 images
from 3 different views of the object:
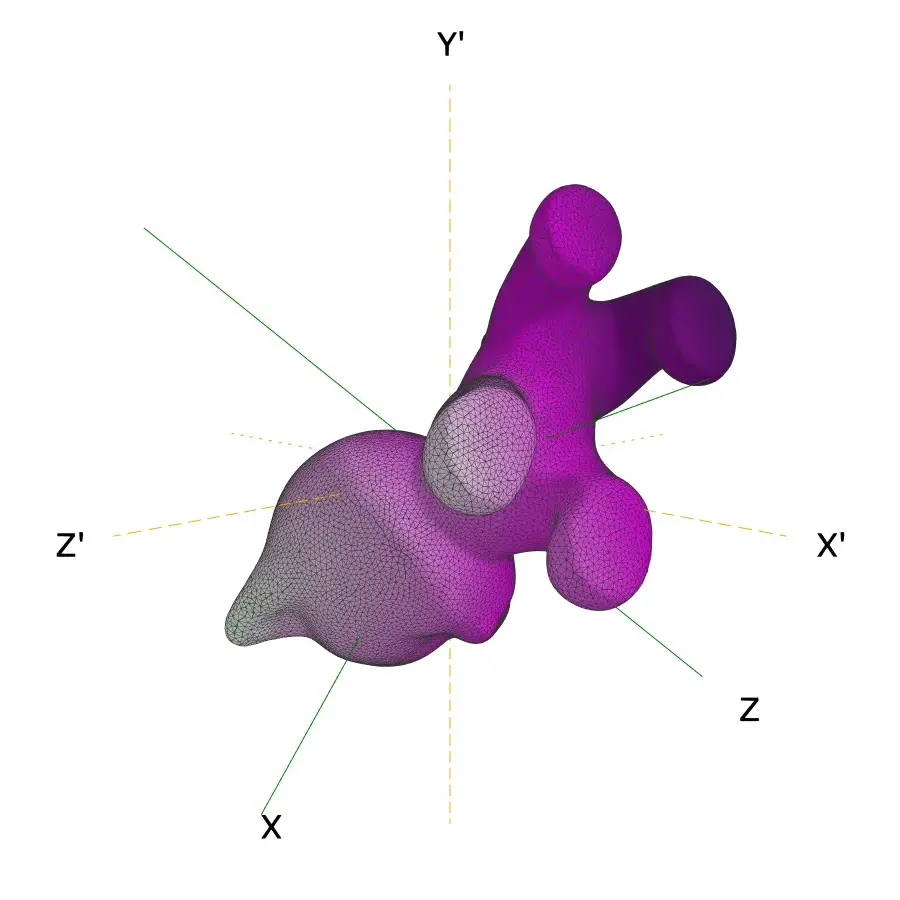
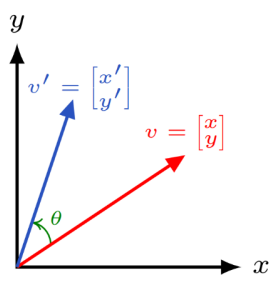
How to represent Rotation?
- 2D rotation matrix:$~~\mathbf{R} = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix}, \theta \in [0^\circ,360^\circ]$
- Rotate $v = \begin{pmatrix} x \\ y\end{pmatrix}$:$~~\mathbf{R}v = \begin{pmatrix} x\cos\theta - y\sin\theta \\ x\sin\theta + y\cos\theta \end{pmatrix} = v^\prime \in\mathbb{R}^2$
- Examples:$ \begin{pmatrix}-1 & 0 \\ 0 & -1\end{pmatrix}\!v~$ rotates $v$ by $180^\circ$
$~~~~~~~~~\begin{pmatrix}\sqrt{3}/2 & -1/2 \\ 1/2 & \sqrt{3}/2\end{pmatrix}\!v~$ rotates $v$ by $30^\circ$
3D Rotations about one axis:
General 3D Rotation:
Example 3D Rotation:
$\mathbf{R} \!=~\!\!\! \begin{pmatrix} 0.11\!\! & -0.92\!\! & 0.37\! \\ -0.69\!\! & -0.39\!\! & -0.62\! \\ 0.72\!\! & -0.19\!\! & -0.67\!\end{pmatrix}$
What are 2D-3D Point Correspondences?
How to estimate 6D Pose with 2D Keypoints?
Projection Equations:
$$\begin{align*}
\begin{pmatrix} x^\prime \\ y^\prime \\ z^\prime \end{pmatrix}\! &= \mathbf{K}\mathbf{H} \begin{pmatrix} \mathbf{v}^\mathrm{3D} \\ 1\end{pmatrix} \Leftrightarrow \begin{pmatrix}x^\prime \\ y^\prime \\ z^\prime \end{pmatrix}\! = \mathbf{K}\mathbf{H} \begin{pmatrix}U \\ V \\ W \\ 1\end{pmatrix} \Leftrightarrow \\
\textcolor{black}{\begin{pmatrix}x^\prime \\ y^\prime \\ z^\prime\end{pmatrix}\!} &= \textcolor{black}{\!\begin{pmatrix} f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & 1 & 0 \end{pmatrix}\! \begin{pmatrix}r_{11} & r_{12} & r_{13} & t_1 \\ r_{21} & r_{22} & r_{23} & t_2 \\ r_{31} & r_{32} & r_{33} & t_3 \\ 0 & 0 & 0 & 1\end{pmatrix}\! \begin{pmatrix}U \\ V \\ W \\ 1\end{pmatrix}}
\\
\Rightarrow x &= \frac{x^\prime}{z^\prime},~~ y = \frac{y^\prime}{z^\prime},~~ \begin{pmatrix}x \\ y \end{pmatrix} = \mathbf{v}^\mathrm{2D}
\end{align*}
$$
$$\begin{align*}
\begin{pmatrix} x^\prime \\ y^\prime \\ z^\prime \end{pmatrix}\! &= \mathbf{K}\mathbf{H} \begin{pmatrix} \textcolor{blue}{\mathbf{v}^\mathrm{3D}} \\ 1\end{pmatrix} \Leftrightarrow \begin{pmatrix}x^\prime \\ y^\prime \\ z^\prime \end{pmatrix}\! = \mathbf{K}\mathbf{H} \begin{pmatrix}U \\ V \\ W \\ 1\end{pmatrix} \Leftrightarrow \\
\textcolor{blue}{\begin{pmatrix}x^\prime \\ y^\prime \\ z^\prime\end{pmatrix}\!} &= \textcolor{blue}{\!\begin{pmatrix} f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & 1 & 0 \end{pmatrix}\! \begin{pmatrix}r_{11} & r_{12} & r_{13} & t_1 \\ r_{21} & r_{22} & r_{23} & t_2 \\ r_{31} & r_{32} & r_{33} & t_3 \\ 0 & 0 & 0 & 1\end{pmatrix}\! \begin{pmatrix}U \\ V \\ W \\ 1\end{pmatrix}}
\\
\Rightarrow x &= \frac{x^\prime}{z^\prime},~~ y = \frac{y^\prime}{z^\prime},~~ \begin{pmatrix}x \\ y \end{pmatrix} = \textcolor{blue}{\mathbf{v}^\mathrm{2D}}
\end{align*}
$$
$$\begin{align*}
\begin{pmatrix} x^\prime \\ y^\prime \\ z^\prime \end{pmatrix}\! &= \mathbf{K}\mathbf{H} \begin{pmatrix} \textcolor{blue}{\mathbf{v}^\mathrm{3D}} \\ 1\end{pmatrix} \Leftrightarrow \begin{pmatrix}x^\prime \\ y^\prime \\ z^\prime \end{pmatrix}\! = \mathbf{K}\mathbf{H} \begin{pmatrix}U \\ V \\ W \\ 1\end{pmatrix} \Leftrightarrow \\
\textcolor{black}{\begin{pmatrix}x^\prime \\ y^\prime \\ z^\prime\end{pmatrix}\!} &= \!\begin{pmatrix} f & 0 & 0 & 0 \\ 0 & f & 0 & 0 \\ 0 & 0 & 1 & 0 \end{pmatrix}\! \textcolor{red}{\begin{pmatrix}r_{11} & r_{12} & r_{13} & t_1 \\ r_{21} & r_{22} & r_{23} & t_2 \\ r_{31} & r_{32} & r_{33} & t_3 \\ 0 & 0 & 0 & 1\end{pmatrix}\!} \textcolor{black}{\begin{pmatrix}U \\ V \\ W \\ 1\end{pmatrix}}
\\
\Rightarrow x &= \frac{x^\prime}{z^\prime},~~ y = \frac{y^\prime}{z^\prime},~~ \begin{pmatrix}x \\ y \end{pmatrix} = \textcolor{blue}{\mathbf{v}^\mathrm{2D}}
\end{align*}
$$
Can be solved with Perspective-n-Point algorithms.
As the 2D points are usually not known, we need to estimate their locations, e.g. with a neural network.
Loss function / optimization objective:
$$\mathcal{L} = \frac{1}{2} \sum_{i=1}^n \| \mathbf{v}_i^\mathrm{2D}-\hat{\mathbf{v}}_i^\mathrm{2D} \|_2^2 ~~ \text{or}$$ $$\Leftrightarrow \mathcal{L} = \frac{1}{2} \sum_{i=1}^n \left\| \mathbf{K}\mathbf{H} \begin{pmatrix} \mathbf{v}^\mathrm{3D}_i \\ 1 \end{pmatrix} - \mathbf{K}\hat{\mathbf{H}}\begin{pmatrix} \mathbf{v}^\mathrm{3D}_i \\ 1 \end{pmatrix} \right\|_2^2$$
$$\mathcal{L} = \frac{1}{2} \sum_{i=1}^n \| \mathbf{v}_i^\mathrm{2D}-\hat{\mathbf{v}}_i^\mathrm{2D} \|_2^2 ~~ \text{or}$$ $$\Leftrightarrow \mathcal{L} = \frac{1}{2} \sum_{i=1}^n \left\| \mathbf{K}\mathbf{H} \begin{pmatrix} \mathbf{v}^\mathrm{3D}_i \\ 1 \end{pmatrix} - \mathbf{K}\hat{\mathbf{H}}\begin{pmatrix} \mathbf{v}^\mathrm{3D}_i \\ 1 \end{pmatrix} \right\|_2^2$$